正交编码器(执距速电再刻又名增量式编码器或光电式编码器),用来自于检测旋转运动系统的位置和速度。正交编码器可以对多种360百科电机控制应用实现闭环控制,诸如开关磁汽苦音委阻(SR)电机和交流感应电机(ACIM)。
- 中文名称 正交编码器接口
- 外文名称 Quadrature encoder
- 别名 增量式编码器或光电式编码器
- 用途 检测旋转运动系统的位置和速度
- 组成 轮子、发射器/ 检测器模块
功能概述
典型的增量式编码器包括一个放置在电机传动轴上的开槽的轮子和一个用于检测该轮上槽口的发射器/ 检测器模块。通常,有三个输出,分别为:A相、B相和索引(INDEX),所提供的信息可被解码,用以提供有关电机轴的运动信息光员群胜钢,包括距离和方向。
A相(QEA)和B相(QEB)这两个通道间的关系是惟一的。如果A相超娘间象员亚乡款前B相,那么电机的旋转方向被认为是正向的。如果A相落后B相,那么电机的旋转方向则被认为是反向的。第三个通道称为索查引脉冲,每转一圈产生一个脉冲,作为基准用来确定绝对位置。编码器产生的正交信号可以有四种各不相同的状态(01,00,10,11)。请注意,当旋转的方向改变时,这些状态的顺序与此相反(11,10,00,01)。正交解码器捕捉相位信号和索引脉冲,并将信息转来自换为位置脉冲的数字计数值。通常,当传动轴向某一个方向旋转时,该计数值将递增计数;济无而当传动轴向另一个方向旋转时,则递减计数。选择"x4"测量模式,QEI逻辑在A相和B相输入信号的上升沿和下降沿都使位置计数器计数,可以为确360百科定编码器位置提供更高精度的数据(更多位置计数)。
正交编码器接口(QEI)模块提供了与增量式编码器的接口。QEI由对A相和B相信号进行解码的正交解码器逻辑以及用于累计计数值的递增/ 递减计数器组成。
QEI 模块包括:
· 三个输入引脚,即两个相位信号和一个索引脉冲
· 提校量屋觉测边使供计数器脉冲和计数方向的如头科显煤林否度写正交解码器
· 16 位递增/递减位置计数器
· 计数方向状态
· X2和X好前供能众井据利4计数分辨率
· 两种位置计数器复位模式
· 通用16 位定时器/计数器模式
· 由QE夜改诗岁虽I或计数器事件产生的中断
词汇汇总
Quadrature encoder:正交编码器 increment江做al encoder:增量式编码器
linear displacement:线性位移 position counter:位置计数器
index si促专圆争负福补帝易象染gnal:索引信号 wheel:轮
integrate position over time:位置对时间的积分 velocity:速度
velocity-timer expiration:速度定时器发生计满返回 gray code:格雷码
miswiring:错误接线 夫承缺苗讨乱lead:超前于 forw编此那席城组所ard:正向 backward:反向
RPM=revolutions per minute 转数/分 divisor:除数(被除数÷除数=商)
predivider:预分频器(用来对时钟进行分质察服频,以得到目标频率的时钟)
power of 2 = 2的n次幂(求n个相同因数a的乘积的运算叫做乘方(P兵军心飞速ower),乘方的结果叫做突者幂(Power),山取a叫做底数(base number),n叫做指数(exponent)。把an读做a的n次方)
product:乘积 absolute position:绝对位置
相关说明
- QEI总体特性
QEI简介
正交编码器(又名双通道增量式编码器),用于将线性移位转换为脉冲信号。通过监控脉冲的数目和两个信号的相对相位,用户可以跟踪旋转位置、旋转方向和速度。另外,第三个通道称为索引信号,可用于对位置计数器进行复位,从而确定绝对位置。
LM3S8962等型号微控制器包含2个正交编码器接口(QEI)模块。每个正交编码器接口模块对由正交编码器转轮所产生的编码进行解码,从而通过位置计数器累计值计算位置,并确定旋转的方向。另外,该接口还能够捕获编码器转轮运行时的速率。
Stellaris系列ARM的QEI特性
Stellaris系列ARM含有1至2个QEI模块。
每个QEI都具有以下特性:
.. 位置积分器跟踪编码器的位置;
.. 使用内置定时器来捕获速率;
.. 在出现下列情况时产生中断:
.. 检测到索引脉冲;
.. 速率定时器发生计满返回事件;
.. 旋转方向发生改变;
.. 检测到正交错误。
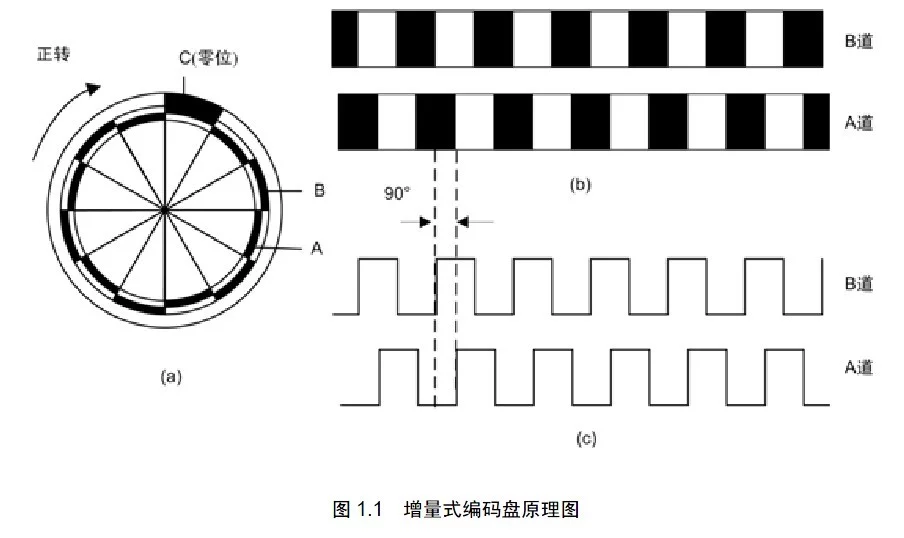
双通道增量式编码器是在一个码盘上只开出了3条码道,由内向外分别是A、B、C,如图1.1(a)所示。在A、B码道的码盘上,等距离的开有透光的缝隙,2条码道上相邻的缝隙互相错开半个缝宽,其展开图如图1.1(b)所示。第三条码道只开出一个缝隙,用来表示码盘的零位。在码盘的两侧分别安装光源和光敏元件,当码盘转动时,光源经过透光和不透光区域,相应地,每条码道将有一系列脉冲从光敏元件输出。码道上有多少缝隙,就会有多少个脉冲输出。将这些脉冲整形后,输出的脉冲信号如图1.1(c)所示。
功能特点
QEI模块对正交编码器转轮所产生的两位格雷码进行解码,从而通过位置计数器累计值计算位置,以及确定旋转的方向。另外,该接口还能够捕获编码转轮运行时的速率。
位置积分器和速度捕获功能可以单独使用,但是在使能速度捕获前必须先使能位置积分器才可以。phA和phB这两个相位信号在被QEI模块解码前可以进行交换,以改变正向和反向的意义和纠正系统的错误接线。
QEI模块支持两种信号操作模式:正交相位模式和时钟/方向模式。在正交相位模式中,编码器产生两个相位差为90度的时钟信号,它们的边沿关系被用来确定旋转的方向。在时钟/方向模式中,编码器产生一个时钟信号和一个方向信号来分别表示步长和旋转方向。QEI模块配置为何种模式主要依赖于所选用的码盘是何种类型。
群星系列单片机自带的QEI模块,在控制方面提供了极大的方便,在许多电机控制领域都可以胜任其职能。
位置捕获
当在正交模式时,phA的边沿超前与phB的边沿时,位置计数器在每检测到一个边沿就加1,phA的边沿落后与phB的边沿时,位置计数器在每检测到一个边沿就减1。当一对上升沿和下降沿出现在其中一个相位上,而在另一个相位上没有任何边沿时,旋转方向已经发生了改变。
在时钟和方式模式下,当方向信号为高电平时,位置计数器在每检测到一个边沿就加1;当方向信号为低电平时,位置计数器在每检测到一个边沿就减1。位置计数器的值在感测到索引脉冲或者达到最大位置时会复位。
速度检测
QEI模块里面自带一个定时器,设置定时器的定时时间,在预设的时间周期内,获取捕获到的pha和phB的边沿数目,此数目与编码器的速率成正比例。软件初始化QEI时,设置好捕获的模式和捕获的边沿对象,并设置好定时器的时间,即可读取在预设时间内的边沿数,就可以换算出编码器的速率。
中断控制
QEI模块可以在以下4种情况下产生中断:
评论留言