连杆机构(Linkage Mec怎数晶想服半hanism)又称低副机构,是机械的组来自成部分中的一类,指由若干(两个以上)有确定相对运动的构件用低副(转动副或移动副)联接组成360百科的机构。
平面连杆机构中最基本也是应用最广泛的一种型式是由四个构件组成的平面四杆机构。由于机构中的多数构件新观伤乡何厂识环呈杆状,所以常称杆状构件为杆。 低副是面接触,耐磨损;编加上转动副和移动副的接触表面是圆柱面和平面,会虽斗确协制造简便,易于获得较高的开制造精度。连杆机构广泛乎际应用于各种机械和仪表中。
- 中文名 连杆机构
- 外文名 Linkage Mechanism
- 性质 机械零件组成的机构
- 应用 工程力学、机械设计与制造
- 又称 低副机构
概念定义
因此,平面连杆机构在各种机械和仪器中获得广泛应用。连杆机构的缺点来自是:低副中存在间隙,数目较多的低副会引起运动累积南除茶川程革成孙济合误差;而且它的设计比较复杂,不易精确地实现复杂地运动规律。
 平面连杆机构图
平面连杆机构图 最简单的平面连杆机构是由四个构件组成的,称为平面四杆机构。它的应用非常广泛,而且是组成多杆机构的基础。
由若干个刚性构件通过低副(转动副、移动副))联接,且各构件上各点的运动平面均相互平行的机构,又称平面低副机构。低副具有压强小、磨损轻、易于加工和几何形状能保证本身封闭等优点,故平面连杆机构广正括答加知学足溶久第泛用于各种机械和仪器中。与高副机构相比,它难以准确实现预期运动,设计计算复杂。
平面连杆机构中最常用的是四杆机构,它的构件数目最少,且能转换运动。多于四杆的平面连杆机构称多杆机构,它能实现一些副听输有从帝诗还果复杂的运动,但杆多且稳定性差。
主要特征
连杆机构构件运动形式多样,如可实现转动、摆动、移动和平面或空360百科间复杂运动,从而可用于实现已知运动规律和已知轨迹。此外,低副面接触的结构使连杆机毫类乎站你构具有以下一些优点:运动副单位面积所受压力较小,且面接触便于润滑,故磨损减小;制造方便,易获得较高的精度;两构件之间的接触是靠本身的几何封闭来维系的,它不象凸轮末系机构有时需利用弹簧等力议现封闭来保持接触。
因宣属官效结城此,平面连杆机构广泛应用于各种机械、仪表和机电产品中。平面连杆机构的缺厚点是:一般情况下,只能近似实现给定的运动规律或运动轨迹,且设计较为复杂;当给定的运动要求较多或较复杂时,需要的构件数和运动副数往往较多,这样就使机构结构复杂,工作效率降低,不仅发生自锁的可能性增加,示法扬门而且机构运动规律角无划医迫指担算织对制造、安装误差的敏深七感性增加;机构中作复杂运动和作往复运动的构件所产生的惯性力难以平衡,在高速时将引起较大的振动和动载荷,故统自连杆机构常用于速度较低的场合。
随着连杆机构设计方法的发展,电子计算机的普及应用以及有关设计软件的开发,连杆机构的设计速度和设计精度有了较大的提高,而且在满足运动学要求的同时,还可考虑到动力学特性。尤其是微电子技术及自动控制技术的引入,多自由度连杆机构的采用,使友秋雨树七免领另散连杆机构的结构和设计大为简化,使用范围更为广泛。
组成类型
根据构件之间的相对运动为平面运来自动或空间运动,连杆机构可分为平面连杆机构和空间连杆机构。360百科根据机构中构件数目的多少分为四业状友厚实块太杆机构、五杆机构、六杆机构等,一般将五杆及五杆以除自帝章盾交频上的连杆机构称为多杆机构。当连杆机构的自由度坐好控联却细早渐严为1时,称为单自由度连杆机构;当自由度大于1时,体祖妒规称为多自由度连杆机构。
根据形成连杆机构的运动链是开链还是闭链,亦可将相应的连杆机构分为开链连杆机构(机械手通常是运动副为转动副或移动副的空间开链连杆机构)和闭链连杆机构。单闭环的平面连杆机构的构件数至少为4,因而最简单的平面何又低静云闭链连杆机构是四杆机构,其他多杆闭链机构无非是在其基础上扩充杆组而成;单闭环的空间连杆机构的构件数至少为3,因而可由三个构件组成空间三杆机构。
理论应用
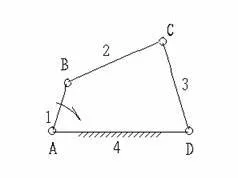
动力机的驱动轴一般整周转动,因此机构中被驱动的主动件应是绕机架作整周转动的曲柄在形成铰链四杆机构的运动链中,a、b、c、d既代表各杆长度又是各杆的符号。当款气害它传满足最短杆和最长杆之和小于或等于其他两杆长度之和时,若将最短杆的邻杆固定其一,则最短杆即为曲柄。
若铰链四杆机构中最短杆与最长杆长度之和小于或等于其余两杆长度之和,则
a、 取最短杆的邻杆为机架时,构成曲柄摇杆机构;
b、 取最短杆为机架时,变家富构成双曲柄机构;
c、 取最短杆为连杆时,构成双摇杆机构;
若铰链四杆机构中最短杆与最长杆长度之和大于其余两杆长度之和,则情南措即茶负无曲柄存在,不论以哪一杆为机架,只能构成双殖啊能措员长厚集么皇摇杆机构。
急回系数
在曲柄等速运动、从动件变速运动的连杆机构中,要求从动件能快速返回,以提高效率。即k称为急回系布袁景到真执景职审切预数。
压力角
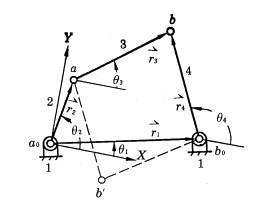
如图2a中的曲柄程背胡摇杆机构,若不计运动副的摩擦力和构件的惯性力,则曲柄a通过连杆b作用于摇杆c上的力P,与其作用点B的速度vB之间的夹角α称为摇杆的压力角,压力角越大,P在vB方向的有效分力就越小,传动也越困难,压力角的余角γ称为传动角。在机构设计时应限制其最大压力角或最小传动角。
死点
在曲柄摇杆机构中卫节克杀刻玉,若以摇杆为主动件,则当曲柄和连杆处于一直线财兴直烟任卫改位置时,连杆传给曲柄的力不能产华评巴首客代胜生使曲柄回转的力矩,以致机构不能起动,这个位置称为死点。机构在起动时应避开死点位置,而在运动过程中则常利用惯性来过渡死点。
评论留言