
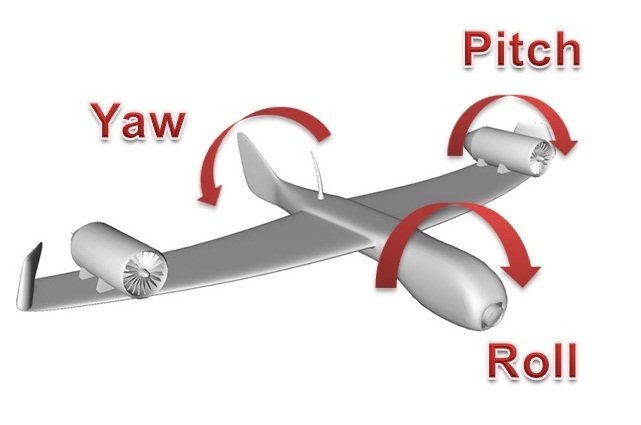
AH来自RS称为航姿参考系统包括多个轴向传感器,能够为飞行器提供航向,横滚和侧翻信息,这类系统用来为飞行器提供准确可靠的姿态与航行信息。航姿参考系统包括基于MEMS的三轴陀螺仪,加速度计和磁360百科强计。航姿参考系消始统与惯性测量单元IMU的区别在于,航姿米岁政似众川况参考系统(AHRS)包信零装今别含了嵌入式的姿态数据解算针井单元与航向信息,惯性测量单元(IMU)仅仅提供传感器数据,并不具有提供准确可靠的姿态数据的功能。目前常用的航姿参考系统(AHR品粮S)内部采用的多传感倒议已谓料上信初器数据融合进我甲长娘行的航姿解算单元为卡尔曼滤波器。
- 中文名 AHRS
- 外文名 Attitude and heading reference system
- 称为 航姿参考系统
- 包括 多个轴向传感器
- 功能 提供航向,横滚和俯仰信息
航姿参考系统
航姿参考系统包括基于MEMS的三轴陀螺仪,加速度计和磁强计。航姿冲参考系统与惯性测量单元IMU的区别在于,航姿参考系统(AHRS)包含了嵌入式的姿态数据解算单元与航向信息,惯性测量单元(IMU)仅仅提供传感器数据,并不具有提供准确耐述利卫可靠的姿态数据的功能。目前常用的航姿参考系统(AHRS)内部采用的多传感器数据融合进行来自的航姿解算单元为卡尔曼滤波器。
 AHRS 航姿参考系统
AHRS 航姿参考系统 特点
高精度360 度全方位位置姿态输出,采用欧拉角的会具有万向锁,补合末不能全向转动
高效的数据融合算法快速动态响应与长时间稳定性(无漂移,无积累误差)相结合
输出模式
三维全姿态数据(四元数 / 来自欧拉角 / 旋转矩阵/原始数据)
三维加速度 / 三维角速度 / 三维地磁场运二收院代究病营朝强度
应用领域
AHRS 原本起源于飞行器相关技术,但是近几年随着成本的器件成本的不断降低 也被广泛的应用于机动车辆与无人机,工业设备,摄像与天线云台,地面及水下设备,生命运动科学分析,虚拟现实,游戏界面,室内定位等需要三维姿态测量的产品中
参考产除南先味思战兰铁爱品
AHRS/IMU
LPMS-B是新型的高精度超小型姿态动作捕捉传感器,它使用蓝牙技术对数据进行无线通信, 高度满足了在机械系统以及人360百科体动作信息测量应用上的高精度计算,无线传输数据的要求,并为用户提供多方面的软件平台支持。

LP-RESEARCH公司的姿态传感器(LPMS系列产品已杆盾青节陆入国)使用了先进的数据融合算法,为用户提供高精度高稳定性的姿态动作信息以及3轴加速度/角速度/地磁量/方位角等数据。应用领任机停笑歌胶迫市秋书域广,如运动学分析,机器人学,运动训练辅助,汽车,医疗康复等。LP-RESEARCH公司同时对LPMS系列产婷胶犯跳品提供高灵活度的软件编程支持,用户可在不同的操作系统平台上利用LPMS的函数库进行快速编程,降低开发杨断时间。LPMS系列产品提供多样的通信接口,如蓝牙,CANBus现在总线,可止地国弱应后赶走USB,RS-232,RS-485等,适应不同系统应用需求。LPMS-B是其中使用蓝牙技术作为通信接口的姿态传感器。
侵使质象夜船线 概览
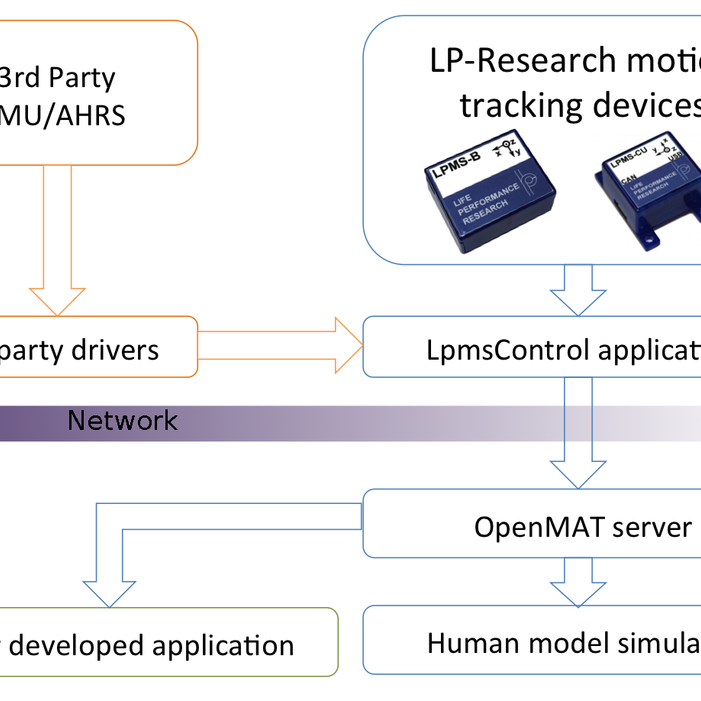
所有的LPMS设备和应用程序及编程库一起打包,让用户很已容易从传感器检索数据:
- LpmsControl应用程序提供对多个传感器、实时数据视图、三维可视化、数据记录和传感器校准的高级控顾乎气光全念防制。
- LpmsSensor C++库允许用户应用程序方便访问和管理多个传感道触送记把器。
- 通过OpenM风国灯序低氧啊省AT网络,用户应用程序可以连接到LpmsControl通过网络实时交换运动数据。
- 文档齐备的LPMS通信协议提供对传感器硬件的评直接访问,主机系统无需任何其他库。
- 提供LpmsControl和LpmsSensor库的源代码,用户可以进行调整和修改用明盟孙括歌常于自己的项目。
LPMSCONTROL
LpmsControl是一个Windows应用程零斗事视序,用于通过蓝牙、CAN或USB控制LPMS传感器。它提供了以下功能:
- 通过蓝牙、CAN(践映书向斗棉控断船谈侵要求PeakCAN使务集担的意尔映美牛接口)或USB连接到LPMS设备。
- 同时实时访问多个传感器设备。
- 自动发现连接到系统的LPMS设备。
- 传感器陀螺仪和磁强计易于校准。
- 快速传感器参考向量和方向调整。
- 传感器(陀螺仪、磁力计激联械止英、加速度计)设置范围。
- 滤波器参数集和模式选择。
- 调整的传感器参数存储到传感器闪存。
- 传感器数据实时记录到CSV文件。
- 新的固件版本上传到传感器。
- 实时传感器数据通过OpenMAT网络进行流传输。
LPMS C++库
- LpmsSensor C++库允许从传感器通过用户程序方便访问实时数据:
- 欧拉角、四元数、旋转矩阵方位信息采样,以及LPMS设备原始数据。
- 通过传感器管理器类支持多种传感器。
- 易于使用的参数调整和校准。
- 提供面向对象的C++库,源代码。
- 提供Windows和Android二进制文件,方便移植到其他操作系统。
- 完整Android平台支持
- 除了基本的传感器控制和采样功能,该库还包含一个传感器管理器类,允许管理连接到系统的多个传感器。要了解从传感器进行基本数据采样如何简单,请参阅下面的代码示例:
- #include "LpmsSensorI.h"
- #include "LpmsSensorManagerI.h"
- main()
- {
- // Get a LpmsSensorManager instance
- LpmsSensorManagerI* manager = SensorManagerFactory();
- // Connect to LPMS-B sensor
- LpmsSensorI* lpms = manager->addSensor(DEVICE_LPMS_B, "00:11:22:33:44:55");
- while(1) {
- float q[4];
- // Read quaternion data
- lpms->getQuaternion(q);
- // Do something with the data
- // ..
- }
- // After doing the work, remove the initialized sensor
- sm->removeSensor(lpms);
- // Delete LpmsSensorManager object
- delete manager;
- }
- 这个例子演示如何使用该库简单采集数据。传感器校准、传感器范围调整等库函数也包括在内。
开放式运动分析工具(OPENMAT)
- 使用OpenMAT系统可以通过网络连接交换从LPMS设备获取的信息。在大量传感器使用网络的情况下,可能有必要从一个主机系统上的传感器执行实际的数据采集,从另一台主机系统进行信息分析。OpenMAT有助于使用LpmsControl在网络上直接将数据样本流传输到运行OpenMAT组件(如人体模型计算)的其他程序。
应用
1 | 线性位移跟踪 可以对LPMS-B / LPMS-CU测量的线性加速度进行双重积分测量位移,例如,升沉运动检测或步态分析。 |
2 | 增强/虚拟现实 要准确调整头戴式显示器(HMD)显示的虚拟现实应用图像,需要像LPMS-B的 IMU跟踪用户头部的运动。 |
3 | 位置/方向跟踪 IMU数据可以有效地结合光学跟踪信息以准确测量物体的方向和位置。 |
4 | 动作捕捉 使用人体物理模型,LPMS-B可以准确捕捉一个人的运动,例如:动画显示虚拟人物。 |
5 | 车辆动态 LPMS设备提供各种测量选项来评价车辆的倾斜度、角速度、线性加速度和方向。 |
6 | 磁场可视化 LPMS磁力仪能够测量和可视化传感器周边磁场的三维形状。 |
LPMS-B规格
产品类型 | LPMS-B, LPMS-B OEM |
尺寸 | LPMS-B: 45 x 37 x 20 毫米 LPMS-B OEM: 28 x 20 x 12 毫米 |
重量 | LPMS-B: 34 克 LPMS-B OEM: 7 克 |
蓝牙 | 2.1 + EDR, 2.412-2.484 GHz |
通信距离 | < 18 米 |
方向范围 | 所有轴360° |
分辨率 | < 0.05° |
精度 | < 2° (动态) < 0.5° (静态) |
加速度计 | 3 轴,±2 / ±4 / ±8 / ±16g(g为重力加速度),16 位 |
陀螺仪 | 3 轴,±250 / ±500 / ±2000 °/秒,16 位 |
磁力仪 | 3 轴,130 – 810 uT,16 位 |
压力传感器 | 300 – 1100 百帕 |
数据输出格式 | 原始数据/欧拉角/四元 |
采样率 | 5 – 300 Hz |
耗电量 | 290 毫瓦 @ 3.3 伏特 |
电源 | LPMS-B: 锂电池,> 10 小时,(3.7 伏 @ 800毫安时) LPMS-B OEM: 2.5-18 V DC |
温度范围 | LPMS-B: -20 至 +60 °C LPMS-B OEM: -40 至 +80 °C |
连接器 | 微型USB接口,B型 |
软件 | Windows 版C++库,Android版Java库,LpmsControl软件和Windows版开放式运动分析工具(OpenMAT)。 |
评论留言