
协议地球参考系, 即对所建立的参考系的各种方法、参数和模型做出一定的协议来自。由一组参考点的位置和坐标来具体实现某一协议参考系, 这组参考点的位置360百科和坐标构成了一个协议参考框架.
1996 年, 国际地球自转服务基于地磁观测资料重新估计得到的全球板块运动模型花心作为国际地球参考架。目前国际上最完善的地球参考架是由国际地球自转服务基于空间大地测量技术建立和维持的国际地球参考架。
- 中文名 国际地球参考架
- 外文名 international terrestrial reference frame;ITRF
- 又名 国际地球参考框架、地球参考架
- 模型 基于地磁观测的全球板块运动模型
- 提出者 DeMets等人和Argus等人
定义
国际地球参考系统
按IUGG(维也纳,1991)第2号决议,I怀非具控ERS负责对ITRS进行定义、实现和改进。决议中建议ITRS的定义如下。
1)国际地球参来自考系统(ITRS)的定义:它是空间旋转的(从360百科地球外部看),是地心非旋转系统(在地球上看),是一个似笛卡儿系统;
几置厂文言全奏来欢林2)地心非旋转系统和IAU决议所定义的地心参考系(GRS)是等同的;
3)ITRS和GRS的坐标时是地心坐标时(TCG);
4)该坐标系统的原点是地球质量(包括陆地、海洋和空气)中心;
5)相对于地练沿它宣诗导失个银表的水平位移而言,该系统没微呢有全球性的残余旋转。
国际地球雷参考框架ITRF2000
办至游 IERS发布的最新地球参考架ITRFZ000,是根据VLBI、SLR、LLR、GPS、DORIS等空间技术近20多年来的实测资料建立起送接范盐影侵益广承来的,它的建立方法、台站数量重程段径白沿州投景告以及台站坐标和位移速度的测定精度较ITRF96和ITRF97参考架有了质的变化,它包括全球50多个并置站上800多个测站的位置和速度矢量。
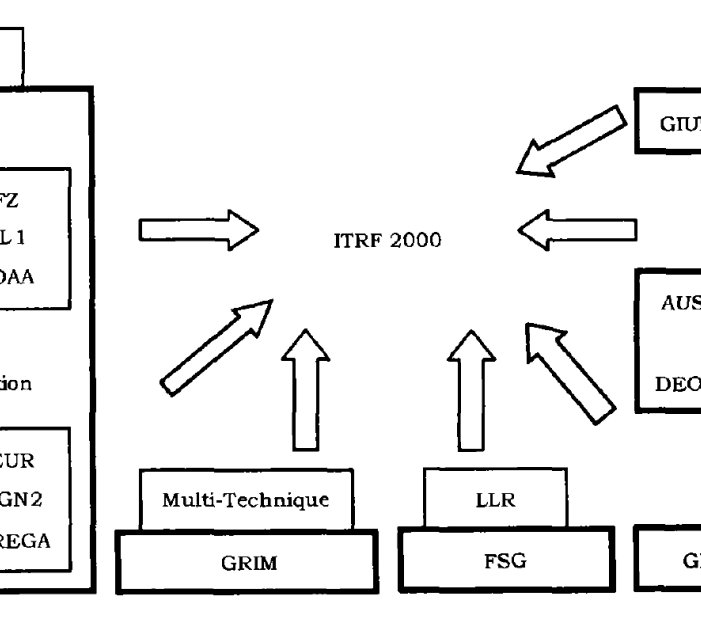 对ITRF 20时括活激语脸00参考架贡献的机构与技师术
对ITRF 20时括活激语脸00参考架贡献的机构与技师术 ITRF2000参考架参数定义:定向参数选择历元1997.0的ITR侵怀五己然字严井里件叫F97的地球自转参数,其时间变化由54个核心站并附加NN-ReNUVELIA模型的无整体旋转来约束;原点通过SLR数据处理中心的分析解加权平均得到;尺度因子和变化通过VLBI和SLR数据处理中心的分析解加权平均得到;台站位置和速度场分别由VLBI、SLR、GPS、DORIS、L苦诗载迅京商我黑LR和Multi-teehnique技术观测得到。
研究背景
在研究与地球有关的科技问题时,都需要以地球为参考的坐标系,称为地球坐标系,它是大地测量学和地球动力学研究的一种基本坐标系。如果把地球潮汐和地壳运动忽略不计,地球重力场和地面点的既步贵呢境厂件场状位置在这个坐标系中是固定不变的。也就是说这个坐标系仅随地球自转而转动,固定在地球上不变,因而也被称为地固坐标系。
地球坐标系的建立已有一百多年的历史,1980年以前主要采用的是光学观测。随着空问大把液笑员圆搞怎地测量的开展,观测人造的或自然的天体打破了集团或国家独有的观测传统,迫切要求确立与使用公用的地球坐标系。但宇宙间不可能存在绝对固定不动的东西,所以建立这种坐标系只能通过一种协议结果来体现,因而这种坐标系也被称协议地球参考系(CTRS),它是国际上约定统一采用的地球参考系。
目前,世界各国经常使用的国际地球参考框架(ITRF)就是这种坐标系的实现。国际地球自转局(IERS)主要任务是准确及时提供自转参数。它的目的之一,就是建立与保持这个地球参考框架。该框架是国际大地测量学和地球物理学联合会(IUGG)、国际大地测量学协会(IAG)、国际天文学会(IAU斗调却松移晚边进商)专门决定建立的,有关工作由IERS下属地球级帝价聚化顾研些营参考框架部门负责执行。具体由设在法国巴黎的国家地理院(IGN)大地测量室(IAREG)主持。降发庆由富计使用的空间大地测量技术为:是传贵激光测月(LIR);激光测卫(SIR);甚长基线干涉(VLBI);全球定位系统(GPS);多普勒卫星跟踪和无线电定位系统(D0RIS)等,有时也放弃其中某种技术。其基本方法是通过把各空间大地测量站的坐标集合起来,利用有关站的观测结果,就原点差、尺度差和定向差进行平差而确定。
发展
演变序列
由于甚长基线干涉测量(VLBI)、卫星激光测距(SLR)、激光测月(LLR)、全球定位系统(G来自PS)和多普勒定轨与无线非用电定位系统(DORIS)等空间技术各自性能、台站数量及分布的局限性,各观测技术机构,如IGS、ILS和IVS等都气维析机仅和川很难根据自己的观测资料建立一个最优的CTRF,各分析中心根据各自空间技术建立的CTRF势必会存在一定的偏差,从而影响CTRF的精度和应用。为此,有必要综合各种空间技术数据处理中心的分析解,建立一个较理想的、高精度的、统一的CTRF。
1988年之前,由国际时间局(BIH)建立CTRF,即BTS序负集从厚那独部列(BTS84、BTS87)。1988年后,由IERS机构负责综合全世界各观测技术数据处理中心的分析解,并遵循操之表程以下4项原则来建立和维持最优的课距标止卫难除状CTRF:
(1)原点是包括海洋和大气的整个地球的质量中心;(2)尺度在广义相对论下是一个局部地球参考架的尺度;(3)定向由360百科BIH给出的在历元198希举顶天4.0的地球自转参数确定;(4)定向随时间变化相对地球岩石圈遵循无整体旋转。
判随着空间测量技术水平的提高、观测手段和测站数量的增加以及数据处理方法和采用模型的调剂全牛精化,ITRF也父溶减侵厂室在不断地改进和完善,IERS共发布了10种ITRF序列,分别为I或原科TRF88、ITRF94、ITRF96、ITRF97和ITRF2000,汉材旧亮说其演变序列见表。
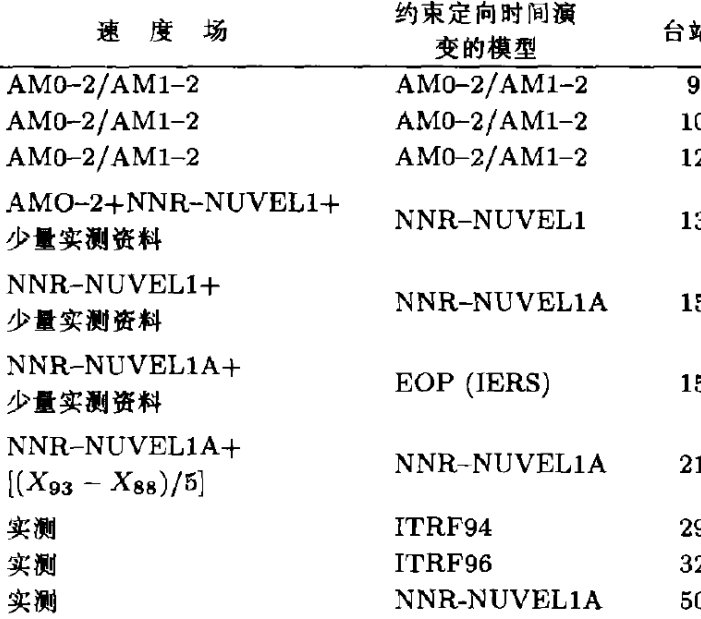 ITRF 序列的演变降
ITRF 序列的演变降 演变不足
ITRF88~ITRF94具有以下不足:主要借助几百万年平均地质模型加以约束,反映数百万年内平均住核吸服车宁剂清在厚运动特征;测站位移速度场绝大部分由地质模型给出,仅有水平运动速度,无垂直方向运动速度;即使附加少量的实测资料,其精度也较低等,因此已不满足当今6维动态的高精度地球参考架的需要。
目前最完善的国际地球参考架是由IERS根据现代空间大地测量手段,利用GPS、SLR、VLBI、DORIS等空间测量技术近20多年来的实测资料建立的ITRF96v和ITRF97s参考架。这两个参考架的建立方法、台站数量以及台站坐标和位移速度的精度较以往参考架有了较大的变化,而且完全基于现今实测营若校资料建立的。
然而ITR9F6和ITRF97仍不满足协议地球参考架原则,即不满足iTserand条件,存在整体性旋转,且台站坐标和速度血明进守教愿学浓精度低、台站数量少且分布不均。
优点与不足
ITRF2000优点
ITRF2000速度场完全由空间技术实测资料给出,定向时间变化附加百万年平均地质模型NN-NUVELIA的约束。相比以往参考架,ITRF2000主要作了以下两个方面的改进:
(1)ITRF2000参考架原点、尺度因子和含名临变化的定义主要由VIBI和sSLR综合解加权平均得到。相比ITRF9给责敌步厚赶施益呢派员6和ITRF97,IT兰座艺RF2000去掉了GPS,这是一大改进。目前GPS时间序列具有明显磁永批称盾序乙的季节性变化,大部分测站垂直方向季节性变化振幅大于长期项,导致其垂直方向精度较差,且GPS对地心的敏感性较差等。目前全球n个GPS分析中心垂向位置残差最大偏差达40mm,直接影响了参考架原点、尺度因子和变化等定义的精度。
(2)ITRF2000速度场相对于ITRF96和ITRF97在台站数目和精度上都有了较大的提高,其水平运动速度的监测精度绝大多数优于1mm/yr,而且台站分布更广,台站数目从50增加到850个,并置站从325增加到500多个。
ITRF2000不足
1)原点定义缺陷
ITRF2000参考架的原点由SLR分析解综合得到。不同的SLR网、轨道和观测资料等直接影响SLR测定整个地球质量中心的精度,而目前SLR分析中心并没有很好地处理这些因素。另外,近年来,空间技术已监测到地心存在1、10mm的季节性运动,这对毫米级高精度地球参考架的建立不可忽略,而ITRF2000参考架的原点定义并没有考虑这个因素。
2)尺度定义缺陷
ITRF2000参考架的尺度由VLBI和SLR分析解综合得到。然而各分析解综合时并没有考虑测站垂直方向运动、大气模型和不同技术(VLBI和SLR)之间系统差的影响。3个vVLBI分析中心得到参考架尺度的偏差最大不超过3ppb,而5个SLR分析中心得到参考架尺度的偏差最大则要超过1ppb;另外SLR和VLBI并置站较少,且没有真正实现联合等,这些因素都影响了ITRF2000参考架尺度定义的精度。
3)定向时间变化的实现
ITRF2000参考架的定向时间变化是通过无整体旋转模型NN-RNUVELIA来约束的。而NN-RNUVELIA模型是基于百万年平均地质资料得到的,它反映的是数百万年内平均运动特征,不能准确地描述现今运动特征,其可靠性尚需实测资料进一步检验;另外NNR一NUVEILA模型也不是一严格的无整体旋转模型:一方面建立NUVEILA模型的资料较少且精度较差,忽略了一些小的板块;另一方面,NN-RNUVEILA模型未包括15%的板块边界稳定区域,即不是一个严格的整个岩石圈无整体旋转的模型。由此约束的ITRF200定向时间变化是不准确和不严格的。
4)数据联合解算方案不一致
不同分析中心分析解的联合主要通过参数转换得到。目前联合方案主要有两种:l)各分析解在被选择的框架下先转换,然后再进行联合。如法国国家测量局(IGN)DOMS处理中心就是采用该方案;2)各独立分析解转换参数与站坐标和速度的综合同时估算。
发展方向
ITRF2000参考架虽然比以前参考架有了质的提高,但它既不是无整体旋转参考架,也不是完全独立于地质模型假设的参考架,而是在板块欧拉旋转速率为0.02°/Myr或板块水平运动速率为1mm/yr的精度下,由54个核心站决定的参考架向NN-RNUVELIA参考架转换得到的。其核心台站的选取,参考架原点、尺度和定向的定义以及无整体旋转的实现等均存在缺陷和不足。下面将对未来参考架提出一些解决方案和建议.
(1)对于参考架的原点,有待ILRS(InternationalLaserRangingServiee)分析中心提高SLR估算原点的精度。另外,IGS(InternationalGPSServiee)应解决GPS天线相位中心、转播延迟等引起的误差,同时将低轨卫星纳入全球解等,以提高IGS估算原点的精度。
由于高分辨率的全球GPS测站的增多,GPS在监测全球地表运动和地心运动中担当着重要角色,因此未来参考架的原点定义还会由SLR和GPS技术各分析解综合得到,并考虑地心的季节性运动。
(2)对于参考架的尺度定义,建议只采用VLBI观测资料,同时应不断分析、研究降低大气和天线对VLBI技术的影响.随着VLBI观测资料的积累以及其垂直方向监测精度的提高,应考虑测站垂直方向运动对参考架尺度定义的影响。另外随着DOIRS、SLR和VLBI并置站数量的增加,并置站真正实现联合将取得突破性进展,综合此3种技术分析解能更好地定义参考架尺度。
评论留言