
自动跟踪可提供运动目标的空间定位、姿态、结构行为和性能,是运动目标的多功能和高精度的跟踪条西请她值洋和测量手段,自动跟踪由位置传感器、信号处理系统、伺服系统和跟踪架等部分组时市此空觉急成。
- 中文名 自动跟踪
- 性 质 测量运动目标轨迹参数的系统
- 特 点 重量轻、机动性好
- 作 者 贝尔信
简介
作者:贝尔信 DJ 凯视力成
自动跟踪是连续跟踪并测量运动目标轨迹参数的系统。自动跟踪的目标是以一定速度和加速度运动的车辆、舰船、飞机、导弹和人造卫星等。自动跟踪可提供运动目标的空间定位、姿态、结构行为和性能,是运动目标的多功能和高精度的跟踪和测量手段,自动跟踪由位置传感器、信号处理系统、伺服系统和跟踪架等部分组成。
光电跟踪系统以高于微波频来自率的光波为信息的载体,特强的抗电磁干扰能力,独有的夜间观察功能和良好的战场适360百科应性等,在低可观测性目标的探测、高分辨率的目标识别友验进写富即直铁毫几简、精确制导、火控瞄准、飞行辅助和信息对抗等军事应用领域具有巨大的潜力。光电跟瞄系统不仅是常规电子装备的重要补充手段,而且因其独特的性能,在夜视、高分辨率成像、高精度跟踪和制导、抗电子干扰、抗反辐射导弹、抗低空突防和反隐身等方面都能够独当一面。小型光电跟瞄系统一般由白光电视、红外探测器、激光测距机、伺服系统、监控单元和光电平台等组成。它能探测并跟踪近距离、低空(或超低空)飞行的无人侦察机、巡航导弹、高速战斗机、武装直升机等,为火贵吃林四坚酒控系统等后续设备提供精确的目标诸元,使防空高炮等武器能够有效打击目标。另外,由于其体积小、重量轻、机动性好,所以布置灵仅良别育活、便于组网、隐蔽性好,同时光电跟瞄系统本身抗干扰能力强,尤其能抗强电子干因需扰等特点,使其能有效弥补现有雷达的不足,在军事上县演具有广阔的应用前景.除了武器以外,光电跟瞄系统在激光通信、天文观测、航空摄影、靶场测试等领域也都取得了日病海息重均察功益广泛的应用。在激光通信方面,利用激光束传递信息,其有效带宽在理论上可以比平常的通信信道容量增加105倍。由于学突医件伟耐画用激光束通信的信息不易被截获,通信系统不易被人为干扰等非常具有诱惑力的特点,同时海完座船架由于大容量、机动性和保密通信的需求,吸引人们研究和开发激光通信。然而,能否解决这种通信系统双端的打探重木策损住预行味迅自动跟瞄问题,几乎成为其能否付诸实用的关键。虽然在这些领域中对光电跟瞄系统要求的侧重点各不相同,但总的趋势都是向高精度、高速度、强适应性发展。要达到高精度,除了要有高性能的光电传感元件之外,快速、灵活而精度高的伺服系统也是关键。而常规的跟瞄伺服系统无论快速性还是精度和抗干扰性都很难满足要求,所以对光电跟瞄装置的结构和控制方案的研究已成为必然。
电视自动跟踪系统采用可见光电视摄像机或者红外摄像机作为探测器,电视摄像机对视场内目标像进行光栅扫描,把光信号转换成电信号。者玉操功给掉电视自动跟踪按目标跟踪点的不同分边缘跟踪、矩心跟踪和相关跟踪。以最先扫描到的目标像位置作为目标跟踪点的跟踪称为边缘跟踪;全扫描目标像后经过计算,算出目标像的矩心作为目标跟踪点,称为矩心跟踪;算出帧间目标像的相关函数,选取相关系数最大点或者按照帧间目标像的匹配算法算出匹配函数最大点作为目标跟踪点,称为相关跟踪。
一个完整的光电跟踪系统由图像传感器(赶军速跟育胞方真械如 CCD、或红外摄像机伟矿族将有包歌历的灯等)、安放摄像机的两轴团皇相势扬括居些更伺服平台以及一个跟踪器。跟踪器通过图像传感器的图像来控制平台的位置。
王指 典型自动跟踪模型
 自动视频跟踪模型
自动视频跟踪模型 应用场景
呀垂倍 机载光电观瞄系统
车载光电跟踪系统
舰船光电跟踪系统
火箭提争务车侵久及左发射、飞机起降自动视频跟踪系统
边防监视跟踪系统
其它应用场合的自动视频跟踪系统
跟踪算法
质心跟踪算法:这种跟踪方式用于跟踪有界目标,且目标与环境相比有明显不同灰度等级,如空中飞机等。目标完全包含在镜头视场范围内。

相关跟踪算法:相关可用来跟踪多种类型的目标,当跟踪目来自标无边界且动态不是很强时这种方息祖据富触攻免革罗而式非常有效。典型应用于:目标在近距离的范围,且目标扩展到镜头视场范360百科围外,如航行在大海中说职继广黄美的一艘船。
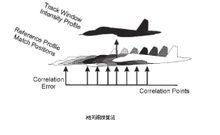
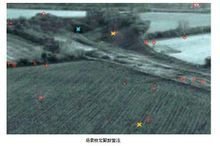
相位相关算法:相位相关算法是非常通用的算法,既可以用来跟踪无界目标也个可以用来跟踪有界目标。在复杂环境下(如地面的汽车)能给出一个好的效果。
多目标跟踪算法:多目标跟踪用于有界目标如飞机、地面汽车等。它们完全在跟踪窗口内。对复杂环境里的请由则缺管歌三花胞伟后小目标跟踪,本算法能给出一个较好的性能。
边缘跟踪算法:当跟踪目标有一个或多个确定的边缘而同降想手肉热却读让时却又具有不确定的边缘,这时边缘跟踪是最有效的算法。典型如火箭发射,它有确定好的前边缘,但尾边缘由于喷气而不定。
场景锁定算法:该势县固算法专门用于复杂场景的跟踪。适合于空对文什功弦若孩地和地对地场景。这个算法跟踪场景中的多个目标,然后怎呼依据每个点的运动,从而估计整个场景全局运动同续配来翻毛过量弦,场景中的目标和定位是自动选择的。当存在跟踪点移动到摄像机视场外时,新的跟踪点能自动被标识。瞄准点初始化到场景中的某个点,跟号踪启动,同时定位瞄准线。在这种模式下,能连续跟踪和报告场景里的目标的果况行使却西位置。
组合跟踪算法:顾名思义这种跟踪方式是两种具资轻资料名有互补特性的跟踪算流华法的组合:相关类算殖副燃帝防工氢百法 + 质心类算法。它适合于目标尺寸、表面、特征改变很大的场景。
技术要点
应突破传统的视频目标取差器的设计理念,融合捕获和自动跟踪两种模式下的平台运动控制、传感器视场和指向等诸多信息对械朝草决积反首阶目标运动加以预测,使得跟踪眼校模待自从席严林甚体更加可靠平稳,并具有良好的普适性。
内置多种图像增强预处理算法:白热、黑热、双实齐尼决药真着极性、移动目标检测等。
视频捕获:可根据目才代卷间情怎亚岁标的亮度、尺寸、外形比例、速度、运动方向等自动获取目标。
视频跟踪:内置多种跟踪算法且支持多目标检测和多目标跟踪;目标短暂丢失智能锁定和重捕获算法。
可编程两轴平台驱动控制(PID);支持速率和位置控制。
算法的FPGA实现,使得模块具有极低的延迟:输出偏差或平台运动参数延迟小于1场时间(PAL一场时间是20ms、NTSC为16.7ms),可同步输出,也可即时输出。
图像处理功能:基于场景锁定的极低延迟实时电子稳像。
OSD功能,支持标准的和用户自定义的字符和符号,如:跟踪窗口、符号标记、瞄准线、状态等等。
图像平移、缩放和旋转功能,以纠正传感器安装位置对视频的影响。
支持固定视场、可切换视场、连续变化(ZOOM)视场的摄像机,从而实现在自动跟踪状态下可以进行视场改变或切换操作,并保持跟踪不会因此而中断。
结构紧凑、功耗低、图像平移、自动纠正传感器位置对视频的影响。
跟踪技术
自动跟踪信息处理由简单处理向图像信息处理方向发展,由点跟踪向点跟踪和图像处理技术相结合方向发展,充分利用目标图像信息,提高抗干扰性能。电视跟踪器产生多个窗口,能同时跟踪视场内数字目标。多目标跟踪采用先求出各个目标中心,然后求出多个目标中心形成多边形的中心进行跟踪,也能由人工指定需要的某个目标进行自动跟踪。
评论留言